Contents
- Neuromechanic - A neuromechanic model of button-pressing
- Simulink and Simscape initialization
- Bayesian Optimizer setup
- Motor, finger and sensor feedback model parameters
- Button model parameters
- OptimizableVariables for Bayesian Optimization
- Training phase
- Testing phase
- Perceptual control system linked to Simulink and Simscape
- Print result plots to folder /results
Neuromechanic - A neuromechanic model of button-pressing
Uses: bayesopt, Simulink, Simscape
Authors: Antti Oulasvirta (1), Byungjoo Lee (2), Sunjun Kim (1) (1) Aalto University; (2) KAIST
Version: September 19 2017
This is the version reported in the Proceedings of CHI 2018 (Oulasvirta, Kim, & Lee, 2018). Read full paper at http://doi.org/10.1145/3173574.3174082
This work is licensed under the Creative Commons Attribution 4.0 International License. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/ or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042, USA.
warning('off','all'); % All warnings off close all; % Clears workspace addpath(genpath(pwd)); % Adds working folder to path
Simulink and Simscape initialization
CFR_HomeDir = pwd; CFL_libname = 'Libraries/Contact_Forces_Lib'; load_system(CFL_libname); load_system('CMFB'); % "hws" means "human workspace", used for storing variables in the human model hws = get_param('CMFB', 'modelworkspace'); hws.DataSource = 'MAT-File'; hws.FileName = 'params'; hws.assignin('peak_int', 0.5); % Set peak of integrated p-center at 500 ms (this will be udpated by the BO with experience) hws.saveToSource; hws.reload;
Bayesian Optimizer setup
See Matlab documentation for reference
max_Time = 1200; % Optimization budget (in seconds) BOexplorationratio = 0.15; % Exploration rate (larger value -> more exploration) traintrials = 8; % Number of repeated attempts of a button press testtrials = 100; % Number of test trials (after model-learning)
Motor, finger and sensor feedback model parameters
See Table 1 in paper for explanation
Motornoise = readtable('i_motornoise.csv'); % Muscle noise parameters Sensory = readtable('i_sensorynoise.csv'); % Sensory feedback noise parameters Finger = readtable('i_finger.csv'); % Physical properties of finger Finger_Stiffness = readtable('i_finger_stiffness.csv'); % Finger pulp model (stiffness per displacement) Finger.flength = 0.06; % Length of finger bone (unit: meters) % Hill-type finger muscle model parameters Finger.Lmag = Finger.L0ag * 0.3; % Minimum length at which the muscle can produce force (agonist) Finger.Lman =Finger.L0an * 0.3; % Minimum length at which the muscle can produce force (antagonist) Finger.Ks = 0.8 * Finger.fcsa; % Stiffness coefficient of passive muscle element Finger.Kd = 0.1 * Finger.Ks; % Damping coefficient of passive muscle element Finger.vmag = Finger.L0ag * 8; % Maximum contraction velocity under no load (agonist) Finger.vman = Finger.L0an * 8; % Maximum contraction velocity under no load (antagonist)
Button model parameters
Button = readtable('i_button.csv'); % Muscle noise parameters Feedback=readtable('i_feedback.csv'); % Physical properties - intensity, loudness - of of light and audio feedback from button-press, respectively Button_Stiffness_temp = readtable('FDdatabase/Mechanical/Samsung SKM-1000UB (2015-05, Cherry MX Blue).csv'); % Tactile button type %Button_Stiffness_temp = readtable('o_linear_fd.csv'); % Linear button d = designfilt('lowpassfir', ... 'PassbandFrequency',0.15,'StopbandFrequency',0.2, ... 'PassbandRipple',1,'StopbandAttenuation',60, ... 'DesignMethod','equiripple'); %Button_Stiffness_temp.Var2 = filtfilt(d,Button_Stiffness_temp.Var2); %Smoothing the empirical stiffness of buttons; Comment this out for Samsung tactile button maximum_travel_index=find(Button_Stiffness_temp.Var1==max(Button_Stiffness_temp.Var1)); x_displacement=[Button_Stiffness_temp.Var1(1:maximum_travel_index)/1000000;(max(Button_Stiffness_temp.Var1)/1000000+0.0001)]; stiffness=[0;diff(Button_Stiffness_temp.Var2(1:maximum_travel_index)/100)./diff(Button_Stiffness_temp.Var1(1:maximum_travel_index)/1000000);10000]; activation_d=zeros(size(stiffness)); activation_d(1)=-0.002; % Activation point of the physical button activation_midair=zeros(size(stiffness)); activation_midair(1)=-100000; % Disable the activation of mid-air button activation_p=zeros(size(stiffness)); activation_p(1)=100000; % Disable the activation of touch button damping=zeros(size(stiffness)); damping(1)=0.1; % Damping of the button spring Button_Stiffness=table(x_displacement,stiffness,activation_p,activation_d,activation_midair,damping); Finger.fstart_height = Finger.fradius+Button.bdepth/2; % Starting height of finger Finger.fstart_height_std = 0.001; % Standard deviation (uncontrollable component) of finger starting height
OptimizableVariables for Bayesian Optimization
These variables define the decision task of the BO, ranges in square brackets Motor command:  % Expected p-center: $ pc_e $ % The current setup assumes a 3.0 second total time window for the simulation
% Expected p-center: $ pc_e $ % The current setup assumes a 3.0 second total time window for the simulation
onag = optimizableVariable('onag', [0.0, 1.5]); % Onset of agonist muscle (s) amag = optimizableVariable('amag', [0.5, 1.0]); % Amplitude of agonist pwag = optimizableVariable('pwag', [1, 5]); % Pulse width of agonist exp_ap = optimizableVariable('exp_ap', [0, (3-0.1)]); % Expected p-center
Training phase
Obtains an optimized motor program over repeated button presses Uses Expected Improvement as the Acquisition function of BO See MATLAB's documentation for description of BO's parameters
disp('Training'); testing = false; training = @(x)perceptualcontrol(x,traintrials,Motornoise,Finger,Feedback, Button,Sensory, testing); results = bayesopt(training, [amag,pwag,onag,exp_ap],'MaxTime',max_Time, 'Verbose', 1, 'PlotFcn',[], ... 'ExplorationRatio', BOexplorationratio, 'NumSeedPoints', 5,'IsObjectiveDeterministic',false, .... 'MaxObjectiveEvaluations', inf, ... 'AcquisitionFunctionName', 'expected-improvement');
Training
Testing phase
Uses the optimized motor program over repeated trials for estimates of performance Results are written in /results
writetable (results.XAtMinObjective,'results/trace'); % Stores winner motor program disp('Testing') testing = @(x,testtrials)perceptualcontrol(x,testtrials,Motornoise,Finger,Feedback,Button,Sensory, true); % Testing = true objvalue = testing(results.XAtMinObjective,testtrials);
Testing
Perceptual control system linked to Simulink and Simscape
This system runs the given motor program and returns objective value to BO See CMFB.slx for the finger + button models
function [objective] = perceptualcontrol(x,n,Neural,Finger,Feedback,Button,Sensory,testing)
% Load the hws Simulink model, access variables in modelworkspace hws = get_param('CMFB', 'modelworkspace'); hws.DataSource = 'MAT-File'; hws.FileName = 'params'; % Passive record-keeping of p-centers for final reporting peak_ps = []; peak_ds = []; peak_ls = []; peak_as = []; % Passive record-keeping of activation and other data for final % reporting activation_points = []; % Button activations activations = []; % Vector of activations (button not activated) ovs = []; % Vector of objective values obtained in repeated trials deltas = []; % Vector of deltas between expected and obtained perceptions percepts = []; % Vector of percepts (after button presssing) displacements = []; velocities = []; muscleforces = []; % n Repeated button-pressing trials, over which the objective score is % computed for i = 1:n % Muscle model: Set trial-specific input parameters % Noise model: additive Gaussian noise hws.assignin('amplitude_ag', abs(random('norm',x.amag,Neural.ag_am_noise))); % Amplitude of agonist hws.assignin('pulsewidth_ag', abs(random('norm',x.pwag,Neural.ag_pw_noise))); % Pulse width of agonist hws.assignin('amplitude_an', 0); hws.assignin('pulsewidth_an', 10); % In the CHI2018 version, antagonist is passive (resists but not activated) ag_pd = min(3,random('norm',x.onag+Neural.ag_motor_delay,Neural.ag_motor_delay_noise)); hws.assignin('phasedelay_ag', ag_pd); % Onset time is subjected to noise and delay caused by to Treisman gating finger_start_height = random('norm',Finger.fstart_height,Finger.fstart_height_std); % Varying start position of finger hws.assignin('finger_start_height', finger_start_height); hws.assignin('window', 3); % Sets the total time window of the simulation (3 seconds in paper) hws.saveToSource; hws.reload; % Save and refresh % Simulate sim('CMFB'); % The rest of this function is used for computing objective score % and reporting variables on physical events in the simulation % Muscle force muscleforce = abs(min(push_muscle_force.data)); % amount of force muscleforces = [muscleforces muscleforce]; % Activation point max_ap = max(keyevent.data); peak_ap = find(keyevent.data == max_ap); % the first keyevent peak_ap = keyevent.Time(peak_ap(1)); size_d = size(raw_displacement.data); size_v = size(velocity.data); % Computing p-centers % Pressure sensation in finger pulp % Note that sensory noises are applied in CMBF.slx max_p = max(pulpcontact.data); % amplitude of peak peak_p = find(pulpcontact.data == max_p); % location of first peak peak_index=peak_p(1); % find first peak peak_p = pulpcontact.Time(peak_index); % take the value at that peak peak_p_shifted = peak_p + Sensory.p_delay; % shift the peal per sensory delay peak_p_asdn = peak_p_shifted; p_power=max_p; p_reliability=1/log2(p_power/Sensory.p_noise); peak_ps = [peak_ps peak_p_asdn]; % Percept: Fingertip displacement min_d = min(displacement.data); peak_d = find(displacement.data == min_d); peak_index=peak_d(1); peak_d = displacement.Time(peak_index); peak_d_shifted = peak_d + Sensory.d_delay; peak_d_asdn = peak_d_shifted; peak_ds = [peak_ds peak_d_asdn]; d_power=Finger.fstart_height-min_d; d_reliability=1/log2(d_power/Sensory.d_noise); % Percept: Light max_l = max(keyeventtime_l.data); peak_l = find(keyeventtime_l.data == max_l); % the first light peak_l = keyeventtime_l.Time(peak_l(1)); peak_l_shifted = peak_l +Sensory.l_delay; peak_l_asdn = peak_l_shifted; peak_ls = [peak_ls peak_l_asdn]; l_power=Feedback.l_intensity*max_l; l_reliability=1/log2(l_power/Sensory.l_noise); % Percept: Auditory max_a = max(keyeventtime_a.data); peak_a = find(keyeventtime_a.data == max_a); % the first beep peak_a = keyeventtime_a.Time(peak_a(1)); peak_a_shifted = peak_a +Sensory.a_delay; peak_a_asdn = peak_a_shifted; peak_as = [peak_as peak_a_asdn]; a_power=Feedback.a_loudness*max_a; a_reliability=1/log2(a_power/Sensory.a_noise); n_keyevents = sum(keyevent.data); % Objective function is set to 0 and increased based on success and % precision and effort objectivevalue = 0.0; raw_max_p = max(raw_pulpcontact.data); % Cue integration MLE % Because active sensory inputs are different per button type, we % separate some parts of computation if(n_keyevents==1&&raw_max_p~=0) % Physical and touch button single activation sum_var = 1/p_reliability + 1/d_reliability + 1/l_reliability + 1/a_reliability; peak_int = (1 / p_reliability / sum_var) * peak_p_asdn + (1 / d_reliability / sum_var) * peak_d_asdn + (1 / l_reliability / sum_var) * peak_l_asdn + ((1 / a_reliability) / sum_var) * peak_a_asdn; activations = [activations 1]; activation_points = [activation_points peak_ap]; elseif (n_keyevents==0&&raw_max_p~=0) % Physical button contacted but not activated sum_var = 1/p_reliability + 1/d_reliability; peak_int = ((1 / p_reliability) / sum_var) * peak_p_asdn + ((1 / (d_reliability)) / sum_var) * peak_d_asdn; objectivevalue = objectivevalue + 1; % + 0.5 / muscleforce; % HACK: encourages the use of more force to activate the button activations = [activations 0]; elseif (n_keyevents==1&&raw_max_p==0) % Midair button not contacted but activated sum_var = 1/d_reliability + 1/l_reliability + 1/a_reliability; peak_int = (1 / d_reliability / sum_var) * peak_d_asdn + (1 / l_reliability / sum_var) * peak_l_asdn + ((1 / a_reliability) / sum_var) * peak_a_asdn; activations = [activations 1]; activation_points = [activation_points peak_ap]; else % If not contacted and not activated sum_var = 1/d_reliability; peak_int = ((1 / (d_reliability)) / sum_var) * peak_d_asdn; objectivevalue = objectivevalue + 2; % + 0.5 / muscleforce; activations = [activations 0]; end percepts = [percepts peak_int]; delta = abs(peak_int - x.exp_ap); deltas = [deltas delta]; objectivevalue = objectivevalue + delta; ovs = [ovs objectivevalue]; end
Print result plots to folder /results
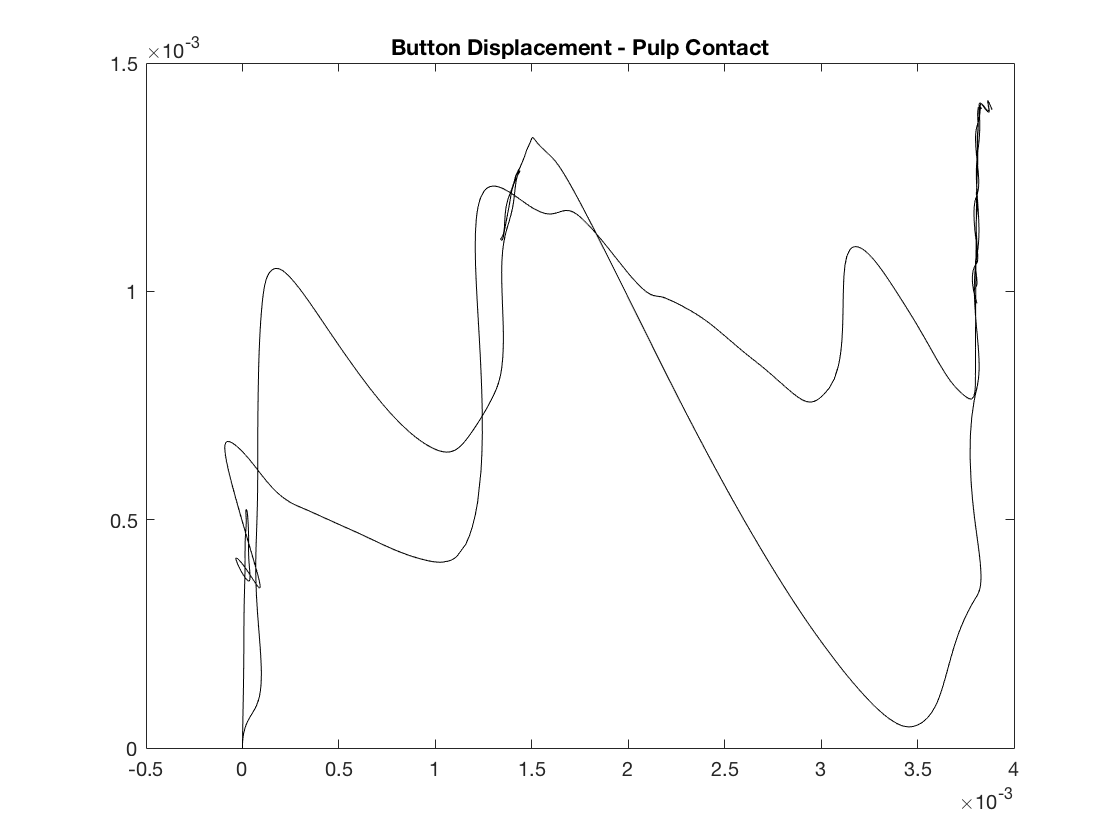
if testing == true % Reporting delta_avg = mean(deltas); delta_std = std(deltas); success_avg = mean(activations); activation_point_std = std(activation_points); activation_point_avg = mean(activation_points); ovs_avg = mean(ovs); muscleforce_avg = mean(muscleforces); muscleforce_std = std(muscleforces); results = table(delta_avg,delta_std,success_avg,ovs_avg,activation_point_avg,activation_point_std,muscleforce_avg,muscleforce_std); disp(results); writetable(results,'results/results.txt'); plot(pulpcontact.time, pulpcontact.data,'Color','black'); title('Pulp contraction'); saveas(gcf,'results/pulpcontraction.fig') saveas(gcf,'results/pulpcontraction.png') plot(displacement.time, displacement.data,'Color','black'); title('Finger tip position'); saveas(gcf,'results/tipposition.fig'); saveas(gcf,'results/tipposition.png'); plot(velocity.time, velocity.data,'Color','black'); title('Finger tip velocity'); saveas(gcf,'results/tipvelocity.fig'); saveas(gcf,'results/tipvelocity.png'); plot(push_muscle_force.time, push_muscle_force.data,'Color','black'); title('Muscle force'); saveas(gcf,'results/muscleforce.fig'); saveas(gcf,'results/muscleforce.png'); plot(push_muscle_force.time, abs(push_muscle_force.data),'Color','black'); title('Muscle force'); saveas(gcf,'results/muscleforce2.fig'); saveas(gcf,'results/muscleforce2.png'); plot(abs(buttonheight.data),abs(push_muscle_force.data),'Color','black'); title('Button displacement vs. Muscle Force'); saveas(gcf,'results/buttonheight-force.fig'); saveas(gcf,'results/buttonheight-force.png'); plot(abs(push_muscle_force.data), abs(buttonheight.data),'Color','black'); title('Muscle force vs. Button height'); saveas(gcf,'results/force-buttonheight.fig'); saveas(gcf,'results/force-buttonheight.png'); plot(acceleration.time, acceleration.data,'Color','black'); title('Finger tip acceleration'); saveas(gcf,'results/tipacceleration.fig'); saveas(gcf,'results/tipacceleration.png'); plot(buttonheight.time, buttonheight.data,'Color','black'); title('Button height'); saveas(gcf,'results/buttonheight.fig'); saveas(gcf,'results/buttonheight.png'); histogram(activation_points); title('Make signal points'); saveas(gcf,'results/activationpoints.fig'); saveas(gcf,'results/activationpoints.png'); histogram(percepts); title('Integrated p-center'); saveas(gcf,'results/pcenters.fig'); saveas(gcf,'results/pcenters.png'); histogram(peak_ps); title('Tactile: p-center'); saveas(gcf,'results/pcenters-pulp.fig'); saveas(gcf,'results/pcenters-pulp.png'); histogram(peak_ds); title('Displacement p-center'); saveas(gcf,'results/pcenters-displacement.fig'); saveas(gcf,'results/pcenters-displacement.png'); histogram(peak_ls); title('Light: p-center'); saveas(gcf,'results/pcenters-light.fig'); saveas(gcf,'results/pcenters-light.png'); histogram(peak_as); title('Audition: p-center'); saveas(gcf,'results/pcenters-audition.fig'); saveas(gcf,'results/pcenters-audition.png'); histogram(muscleforces); title('Muscle forces'); saveas(gcf,'results/muscleforces.fig'); saveas(gcf,'results/muscleforces.png'); plot(raw_pulpcontact.time, raw_pulpcontact.data,'Color','black'); title('Pulp contraction'); saveas(gcf,'results/pulpcontraction-raw.fig'); saveas(gcf,'results/pulpcontraction-raw.png'); plot(raw_displacement.time, raw_displacement.data,'Color','black'); title('Displacement of finger tip'); saveas(gcf,'results/displacement-raw.fig'); saveas(gcf,'results/displacement-raw.png'); plot(Finger.fstart_height-raw_displacement.data, -velocity.data,'Color','black'); title('Finger Displacement - Finger Velocity'); saveas(gcf,'results/displacement-fingervelocity.fig'); saveas(gcf,'results/displacement-fingervelocity.png'); plot(displacements, velocities,'Color','black'); title('Finger Displacement - Finger Velocity'); saveas(gcf,'results/displacements-fingervelocities.fig'); saveas(gcf,'results/displacements-fingervelocities.png'); plot(-buttonheight.data, -velocity.data,'Color','black'); title('Button Displacement - Finger Velocity'); saveas(gcf,'results/buttonheight-fingervelocity.fig'); saveas(gcf,'results/buttonheight-fingervelocity.png'); plot(-buttonheight.data, raw_pulpcontact.data,'Color','black'); title('Button Displacement - Pulp Contact'); saveas(gcf,'results/buttonheight-contact.fig'); saveas(gcf,'results/buttonheight-contact.png'); end % Compute objective function, weighing temporal precision (ovs) and muscle % effort (muscleforces) objective = mean(ovs) + mean(muscleforces) * 0.33;
delta_avg delta_std success_avg ovs_avg activation_point_avg activation_point_std muscleforce_avg muscleforce_std
_________ _________ ___________ _______ ____________________ ____________________ _______________ _______________
0.042828 0.037211 0.89 0.18283 0.37882 0.053356 1.5215 0.14323
end
|===============================================================================================================================|
| Iter | Eval | Objective | Objective | BestSoFar | BestSoFar | amag | pwag | onag | exp_ap |
| | result | | runtime | (observed) | (estim.) | | | | |
|===============================================================================================================================|
| 1 | Best | 1.5101 | 28.053 | 1.5101 | 1.5101 | 0.62135 | 3.9435 | 1.4683 | 1.1433 |
| 2 | Best | 1.2912 | 23.016 | 1.2912 | 1.304 | 0.92765 | 2.0363 | 0.39225 | 0.92023 |
| 3 | Accept | 2.3816 | 29.939 | 1.2912 | 1.2914 | 0.77267 | 4.6403 | 1.0797 | 2.7476 |
| 4 | Accept | 1.3757 | 22.071 | 1.2912 | 1.2912 | 0.80379 | 1.2142 | 1.3966 | 1.8495 |
| 5 | Best | 1.181 | 25.611 | 1.181 | 1.1812 | 0.524 | 4.6128 | 0.43232 | 0.9853 |
| 6 | Accept | 1.4922 | 29.079 | 1.181 | 1.224 | 0.69704 | 4.3845 | 1.2058 | 2.0619 |
| 7 | Accept | 1.7298 | 23.304 | 1.181 | 1.2741 | 0.6156 | 2.8311 | 0.040666 | 1.4207 |
| 8 | Accept | 2.1406 | 30.983 | 1.181 | 1.1811 | 0.94485 | 4.8265 | 1.4336 | 0.67495 |
| 9 | Best | 1.0098 | 26.406 | 1.0098 | 1.0099 | 0.5053 | 4.3037 | 1.0636 | 0.88208 |
| 10 | Best | 1.0055 | 26.935 | 1.0055 | 1.0055 | 0.50136 | 4.4366 | 0.82979 | 0.71387 |
| 11 | Best | 0.85567 | 23.612 | 0.85567 | 0.85595 | 0.50139 | 3.0941 | 0.74097 | 0.74259 |
| 12 | Accept | 1.3523 | 20.826 | 0.85567 | 0.9276 | 0.50458 | 1.0581 | 0.9277 | 1.2649 |
| 13 | Best | 0.58859 | 25.244 | 0.58859 | 0.58884 | 0.50513 | 3.7613 | 0.38235 | 0.58384 |
| 14 | Accept | 1.5703 | 25.52 | 0.58859 | 0.61075 | 0.51382 | 3.6367 | 0.89072 | 0.21783 |
| 15 | Accept | 0.67466 | 23.792 | 0.58859 | 0.61312 | 0.50147 | 2.925 | 0.11741 | 0.53586 |
| 16 | Accept | 1.3718 | 20.668 | 0.58859 | 0.58881 | 0.50996 | 1.2075 | 0.29124 | 0.62779 |
| 17 | Accept | 1.6621 | 25.161 | 0.58859 | 0.58875 | 0.55286 | 3.4309 | 1.4429 | 0.57366 |
| 18 | Accept | 0.97351 | 23.076 | 0.58859 | 0.69442 | 0.51071 | 3.7767 | 0.078104 | 0.60784 |
| 19 | Best | 0.55796 | 24.837 | 0.55796 | 0.55789 | 0.50339 | 3.2367 | 0.39307 | 0.60073 |
| 20 | Accept | 0.60196 | 24.425 | 0.55796 | 0.55788 | 0.5103 | 3.0939 | 0.30016 | 0.45079 |
|===============================================================================================================================|
| Iter | Eval | Objective | Objective | BestSoFar | BestSoFar | amag | pwag | onag | exp_ap |
| | result | | runtime | (observed) | (estim.) | | | | |
|===============================================================================================================================|
| 21 | Accept | 0.91476 | 27.464 | 0.55796 | 0.55789 | 0.61524 | 3.336 | 0.36457 | 0.56458 |
| 22 | Accept | 0.62221 | 24.715 | 0.55796 | 0.56668 | 0.50297 | 3.4723 | 0.40586 | 0.535 |
| 23 | Accept | 0.8462 | 23.732 | 0.55796 | 0.60918 | 0.50059 | 3.1965 | 0.38377 | 0.65138 |
| 24 | Accept | 0.59794 | 24.656 | 0.55796 | 0.59779 | 0.50587 | 3.3621 | 0.32111 | 0.47521 |
| 25 | Accept | 0.76113 | 23.868 | 0.55796 | 0.64589 | 0.50943 | 3.3007 | 0.35384 | 0.49728 |
| 26 | Best | 0.54811 | 25.468 | 0.54811 | 0.61965 | 0.50056 | 3.1227 | 0.18727 | 0.40118 |
| 27 | Accept | 0.72499 | 24.187 | 0.54811 | 0.62565 | 0.50212 | 3.3477 | 0.15103 | 0.33918 |
| 28 | Accept | 0.67325 | 23.019 | 0.54811 | 0.62804 | 0.50122 | 3.1438 | 0.27783 | 0.45813 |
| 29 | Accept | 0.72552 | 23.588 | 0.54811 | 0.63754 | 0.50231 | 3.2461 | 0.27185 | 0.39601 |
| 30 | Accept | 1.1332 | 22.109 | 0.54811 | 0.69021 | 0.50078 | 3.1128 | 0.1986 | 0.43216 |
| 31 | Accept | 0.98932 | 26.083 | 0.54811 | 0.72266 | 0.50008 | 3.4942 | 0.39821 | 0.55219 |
| 32 | Accept | 0.72789 | 23.888 | 0.54811 | 0.72194 | 0.5007 | 3.6619 | 0.30718 | 0.4846 |
| 33 | Accept | 0.81813 | 24.677 | 0.54811 | 0.72792 | 0.50058 | 3.751 | 0.31178 | 0.47442 |
| 34 | Accept | 0.76416 | 25.91 | 0.54811 | 0.72996 | 0.5016 | 3.1983 | 0.34111 | 0.5167 |
| 35 | Accept | 0.57772 | 24.393 | 0.54811 | 0.71755 | 0.50234 | 3.4561 | 0.29292 | 0.52174 |
| 36 | Accept | 0.63157 | 24.598 | 0.54811 | 0.71039 | 0.50464 | 3.8245 | 0.26293 | 0.45875 |
| 37 | Accept | 0.6124 | 26.777 | 0.54811 | 0.70644 | 0.50304 | 3.8594 | 0.18422 | 0.40886 |
| 38 | Accept | 0.65475 | 25.519 | 0.54811 | 0.69091 | 0.50619 | 4.188 | 0.17162 | 0.33661 |
| 39 | Accept | 0.63075 | 26.477 | 0.54811 | 0.68631 | 0.5014 | 4.2682 | 0.17223 | 0.35386 |
| 40 | Accept | 0.65671 | 25.726 | 0.54811 | 0.67262 | 0.50177 | 4.6173 | 0.099236 | 0.27529 |
|===============================================================================================================================|
| Iter | Eval | Objective | Objective | BestSoFar | BestSoFar | amag | pwag | onag | exp_ap |
| | result | | runtime | (observed) | (estim.) | | | | |
|===============================================================================================================================|
| 41 | Accept | 0.96019 | 28.17 | 0.54811 | 0.70263 | 0.50039 | 4.6286 | 0.25635 | 0.43321 |
| 42 | Accept | 1.128 | 25.608 | 0.54811 | 0.695 | 0.50006 | 3.8349 | 0.037558 | 0.23365 |
| 43 | Accept | 0.5995 | 27.01 | 0.54811 | 0.68749 | 0.50034 | 3.8529 | 0.31292 | 0.49788 |
| 44 | Accept | 0.59574 | 25.496 | 0.54811 | 0.68129 | 0.50035 | 4.0879 | 0.24637 | 0.47807 |
| 45 | Accept | 0.65959 | 26.799 | 0.54811 | 0.67945 | 0.50255 | 4.0689 | 0.23858 | 0.45165 |
| 46 | Accept | 0.6729 | 27.937 | 0.54811 | 0.67469 | 0.50533 | 4.1576 | 0.2548 | 0.44915 |
| 47 | Accept | 0.65099 | 25.382 | 0.54811 | 0.67219 | 0.50116 | 4.0818 | 0.34767 | 0.50448 |
__________________________________________________________
Optimization completed.
MaxTime of 1200 seconds reached.
Total function evaluations: 47
Total elapsed time: 1215.7282 seconds.
Total objective function evaluation time: 1185.8141
Best observed feasible point:
amag pwag onag exp_ap
_______ ______ _______ _______
0.50056 3.1227 0.18727 0.40118
Observed objective function value = 0.54811
Estimated objective function value = 0.67219
Function evaluation time = 25.4683
Best estimated feasible point (according to models):
amag pwag onag exp_ap
_______ ______ _______ _______
0.50464 3.8245 0.26293 0.45875
Estimated objective function value = 0.67219
Estimated function evaluation time = 25.462